Pichuto Jr.
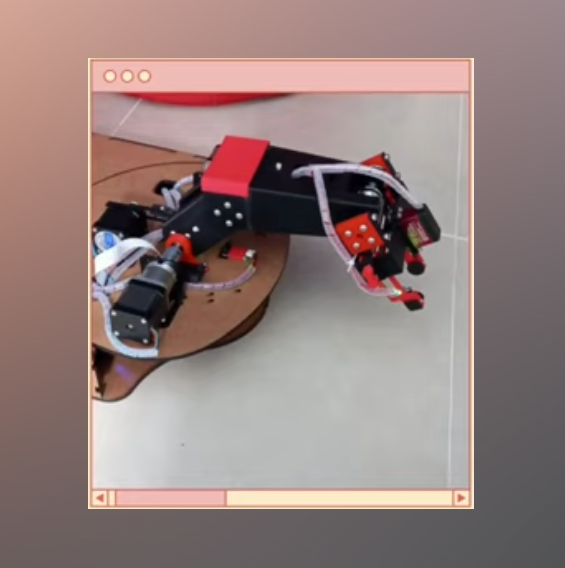
Anthropomorphic thimblerig player robot.
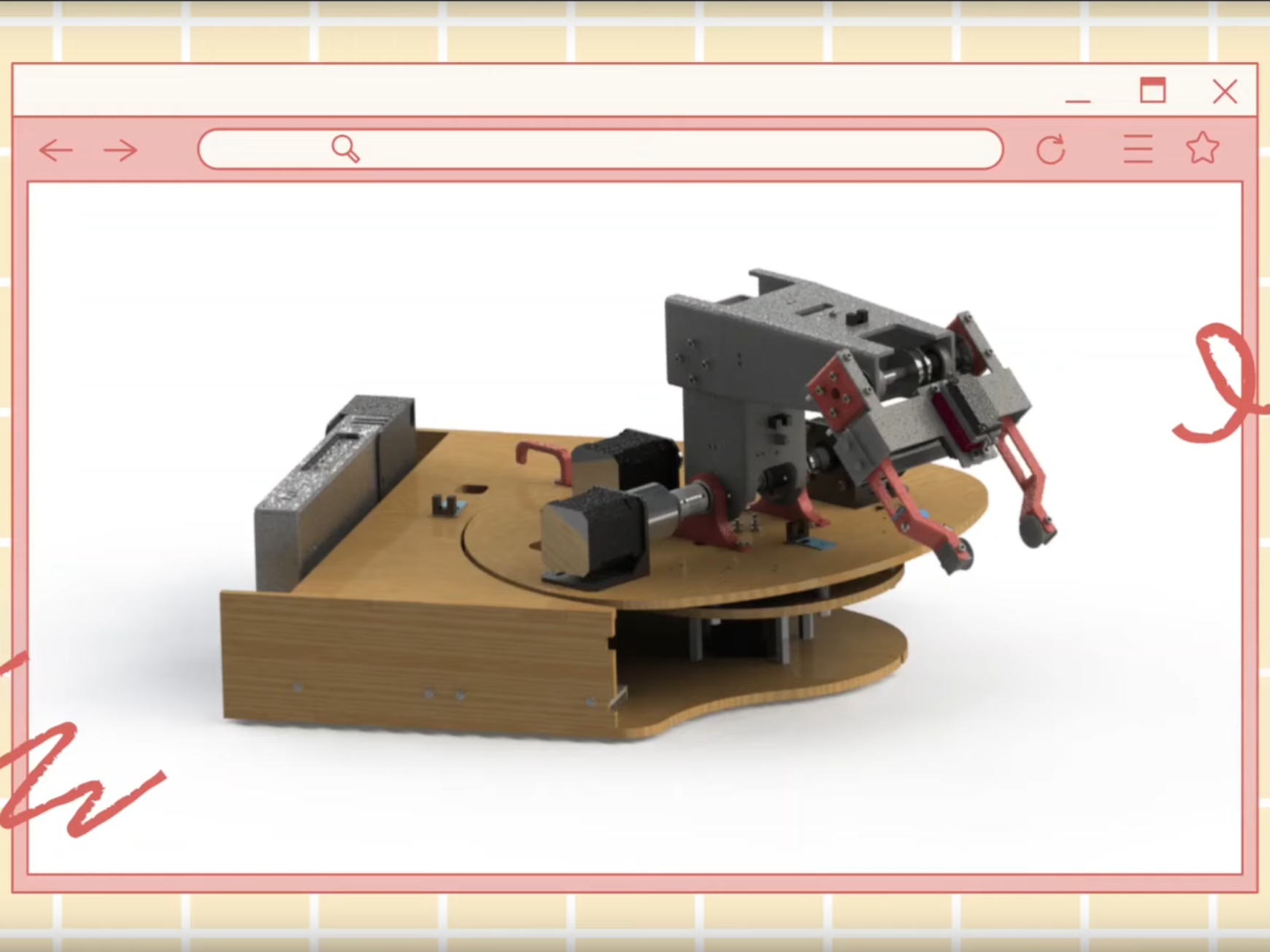
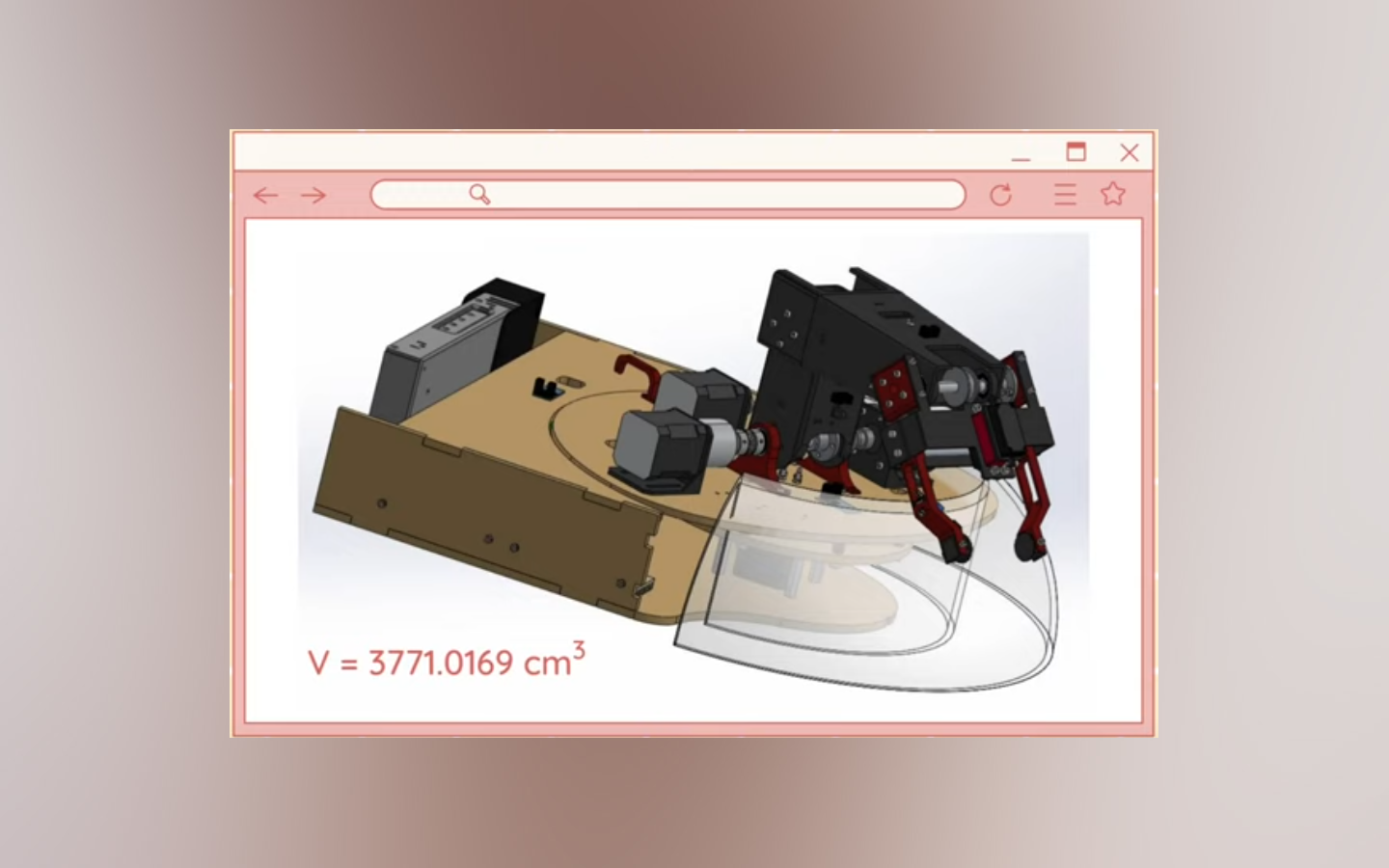
With four degrees of freedom, the robot was able to move across space while maintaining a constant height and orientation.
The work area of the robot was 3771.02 cm³, being able to move objects within this space.
The robot's goal was playing thimblerig, a game in which it had to hide an object under a vase, and shuffle in order to confuse the user, who must guest it's location.

People involved in the development and making of this project.

Managed the physical construction of the robot arm, as well as the electronics design and implementation, from the creation of the circuit board to the wiring.

Was in charge of the programming and mathematics behind the functioning of the robot, created the arm's movement algorithm and obtained Denavit-Hartenberg parameters.