Pichuto Jr.
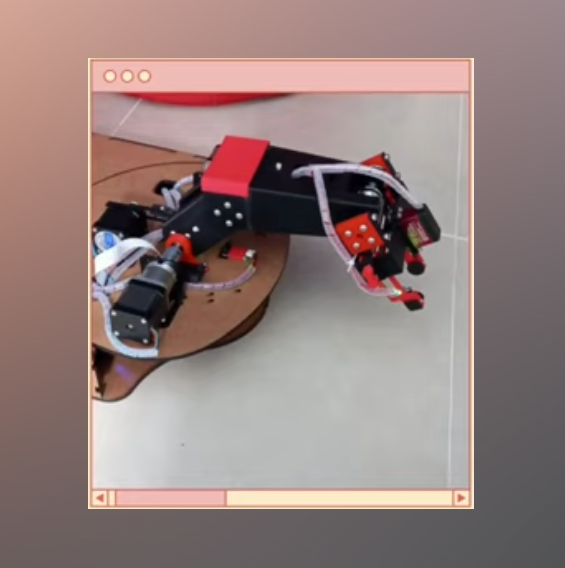
Robot antropomórfico que juega al trile.
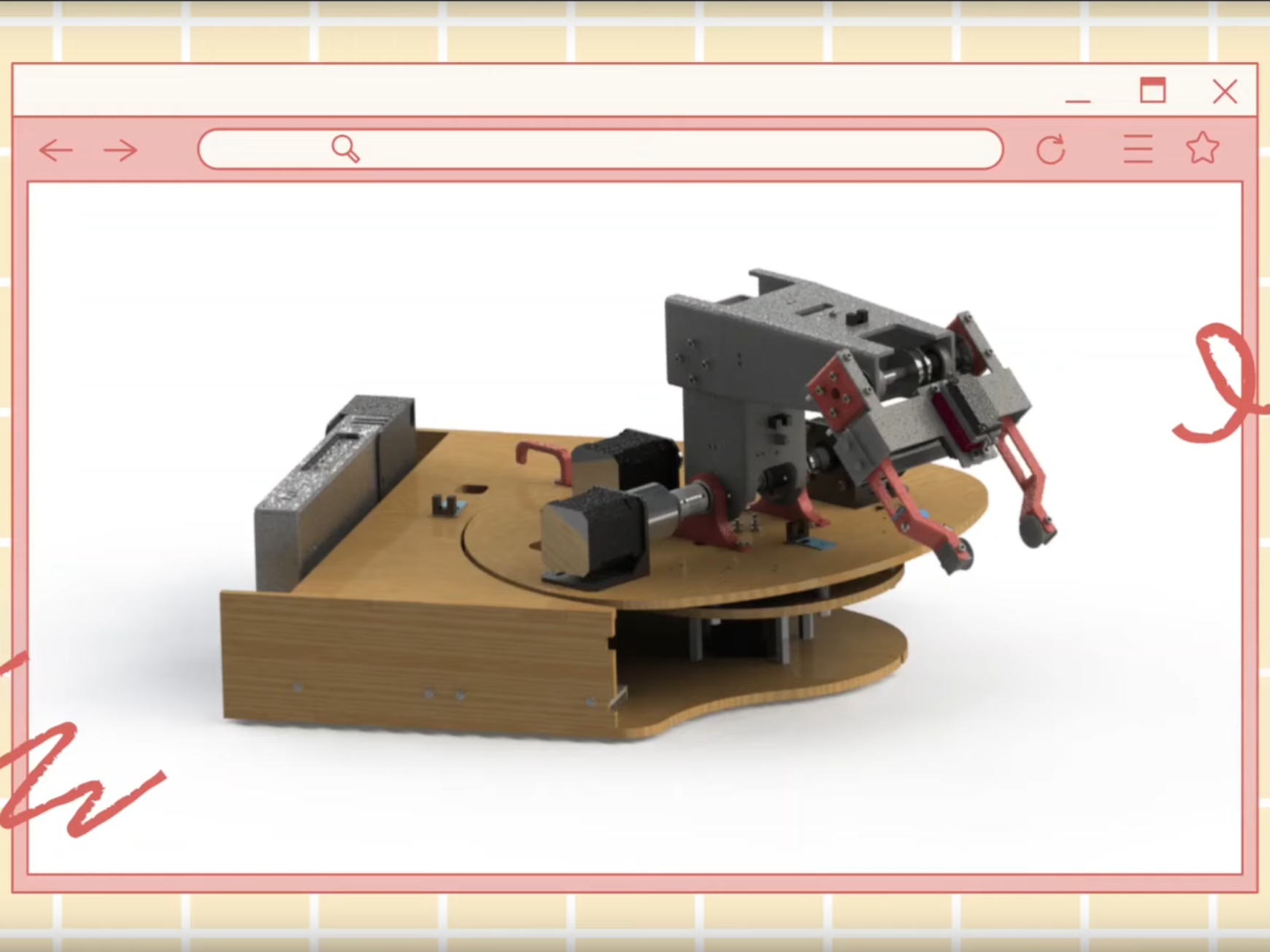
Con cuatro grados de libertad, el robot podía moverse por el espacio manteniendo altura y orientación constantes.
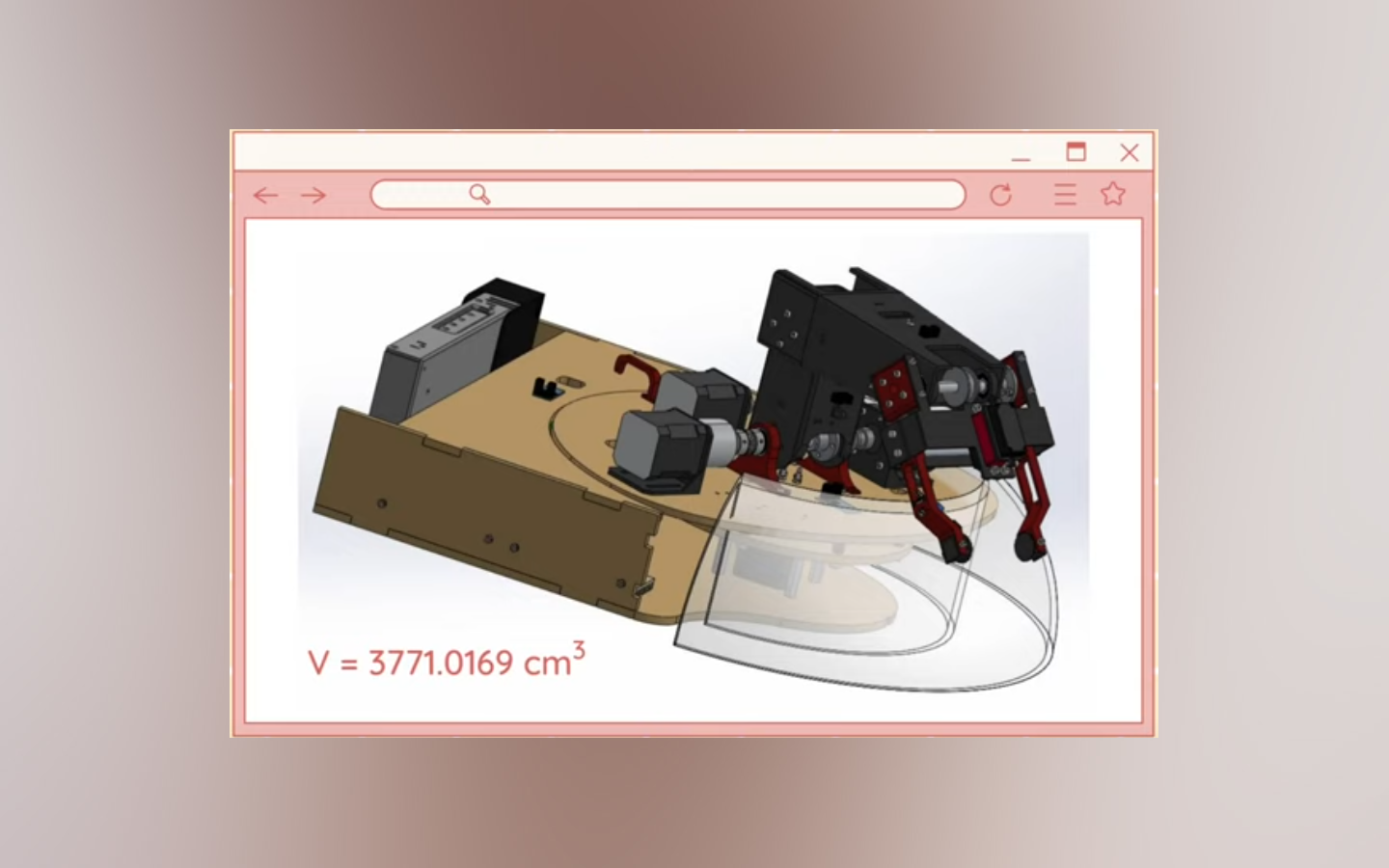
El área de trabajo del robot era de 3771.02 cm³, pudiendo mover objetos dentro de este espacio.
El objetivo del robot era jugar al trile, un juego en el que debe ocultar un objeto bajo un vaso y mezclarlo para confundir al usuario, quien debe adivinar su ubicación.

Personas involucradas en el desarrollo y elaboración de este proyecto.

Gestionó la construcción física del brazo del robot, así como el diseño electrónico e implementación, desde la creación del circuito hasta el cableado.

Encargado de la programación y matemáticas detrás del funcionamiento del robot, creó el algoritmo de movimiento del brazo y obtuvo los parámetros de Denavit-Hartenberg.